HeKa Projects
HeKa Projects
Projekt RUFUS
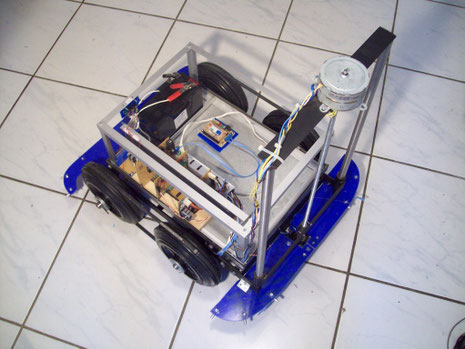
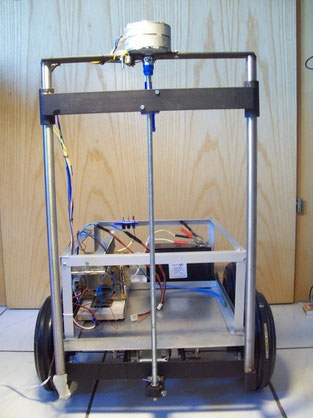
RUFUS, der Roboter ist sozusagen das erste unserer größeren Projekte. Dabei handelt es sich um ein Gefährt, das sich mittels Kettenantrieb fortbewegen kann.
Der Plan war, dass der Roboter sowohl per Fernsteuerung bedient, als auch selbstständig agieren kann. Des Weiteren sollte RUFUS über zahlreiche Sensoren verfügen, die die Umgebung erfassen, um daraus Handlungen abzuleiten.
Das Projekt ist jedoch soweit bis auf unbestimmte Zeit eingestellt, weil einerseits das Fahrwerk nicht so optimal ist, wie wir das gerne hätten, weil die Tastersensoren Probleme machen und einmal generalüberholt werden müssten, weil RUFUS ein sehr schwerer und großer Bocken ist und somit recht unhandlich zum Experimentieren in begrenzten Platzverhältnissen. Auch kostet jede Entwicklung Geld und wir machen derzeit einfach lieber etwas anderes.
Doch als wir noch richtig begeistert am RUFUS - tüfteln waren, entstand eine eigene Website für das Projekt, auf der alles sehr detailiert beschrieben ist, von der Mechanik, den Motoren etc. angefangen über die Elektronik, RUFUS´s Bussystem, bis hin zur Software und weiteren Überlegungen, geplanten Dingen und so weiter:
Hier noch ein paar Bilder von RUFUS: